


海洋講座「富山と日本海」14.海洋観測と技術
第14回「海洋観測と技術」
石森繁樹
14.1 海洋観測
海を知る最良の方法は海を観測することであろう。海の観測といえば流速を測るものや水温、塩分、透明度など海水の特性を知るものが代表的だが、目的によって様々な観測が行われる。海洋観測指針(1)には、採水と測温、測流、海水の透明度と水色、測深、海洋の底質と地殻、海水の化学分析、海洋生物、海洋の放射能、波浪、潮汐、津波と高潮、海氷の測定について総論、測定方法、測定機器、計算方法、観測結果の整理、原簿の記載法など詳細な記述がある。
富山湾の海流はどうなっているのだろうか。図14.1は電磁海流計(GEK、Geomagnetic Electro Kinematograph)により流れを観測した例(2)である。1974年4月から7月にかけて実施した10回の観測値を一枚の図に描いてある。湾内33点での平均流速は0.54ノット(標準偏差0.20ノット)、最強1.0ノットで、いずれも湾奥に向かう南流成分をもっていた。北部海域の観測が抜けているので富山湾全体の海流像にはなっていないが他機関の観測と同じ傾向を示している。GEKの測定原理はなかなか面白く、地球磁場の中で電極をつけた電線を曳航し発生する起電力(ファラデーの電磁誘導の法則、ローレンツ力)から流速を知るものである。実際の海流を測定するには船を直交する2つのコースで反転往復して走らせる必要がある。
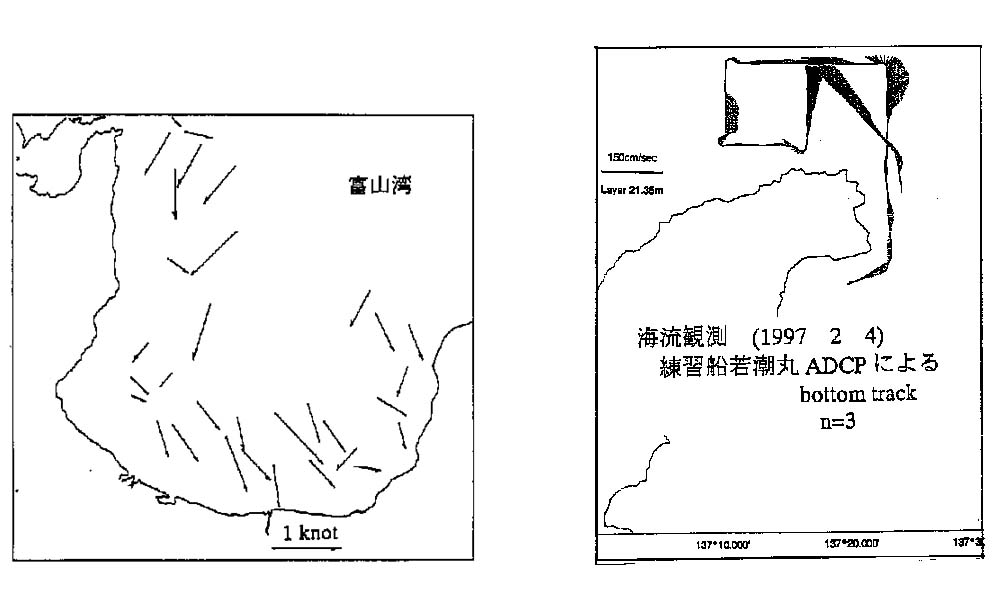
図14.1 GEK観測(1974) 図14.2 能登半島付近の海流
図14.2は音波を利用した海流計ADCP(Acoustic Doppler Current Profiler)で計測された流れ(3)を示している。輪島沖の海面下20mにおいて0.6~0.7ノットの東流がみられるが流速は場所により大きく変化している。ADCPの測定原理(4)は、船底に取り付けられたトランスデューサから超音波(例えば150kHz)のパルスを送信し水中のプランクトンや粘土粒子などの微粒子が散乱する音波を同じトランスデューサで受信する。散乱体がトランスデューサの方向に近づけば受信波の周波数は送信波の周波数より増加し、その差であるドップラーシフトが得られる。散乱体となる微粒子がその場の流れに身をまかせて流されるものとすれば、ドップラーシフトから音源に相対的な流れを求めることができる。散乱体からの受信波はレイリー散乱と考えられる。音波の波長が約1cmであるのに対して散乱体の大きさは1~100μmのオーダーと見られるからである。図14.3はアルゴス・ブイの漂流軌跡である。1997年1月のナホトカ号重油流出事故に際して海上保安庁が放流したブイの軌跡で、流れの状況をわかりやすく教えている。このシステムは海面のブイに抵抗体(穴があいた円筒)を吊り下げ、ブイが発信する電波をNOAA衛星で受信し位置を計算して表層の流動を求めるものである。1月12日に沈没推定海域で3個、1月16日に能登半島先端付近で1個が投入されたが4個とも個性的に流れているのが印象的である。能登半島先端からのブイは南から南東へ流れ、直径約40kmの反時計回りの輪を3度描いて糸魚川の海岸に漂着した(2月10日)。このブイの軌跡を見ると、重油が富山湾に侵入しなかった理由は、タイミングよく吹きだした南西風によるものと納得できる。漂流ブイは風の直接的な影響を少なくするため抵抗体の中心が海面下15mになるよう設計されている。
図14.3 アルゴス・ブイの漂流軌跡 (海上保安庁 1997.1)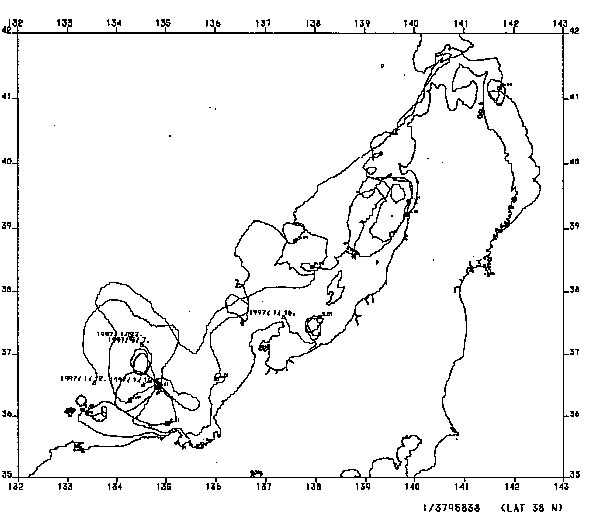
以上富山湾で実施してきた流れの観測例を2、3述べたが測流ひとつとっても多様な方法がある。
ここで、海洋観測に関する話題を2つ紹介する。
ひとつはアルゴ計画(Argo project)である。海洋と気候の関係を理解し、気候の予測を行うには世界の海洋の状況把握が不可欠である。本計画は中層フロート(図14.4)を世界の海に3000個投入して全海洋を常時観測するシステムとして国際協力の下で推進されている。2006年2月時点で2151個の中層フロートが投入されている(図14.5)。ブイは海面から深さ2000mまでの間を自動的に浮き沈みしながら水温と塩分を観測し、衛星経由でデータを配信している。データは誰もが自由に使用でき、海洋内部の水温や塩分の分布状況、中層フロートが流れる深度の流れの把握などに利用されている。
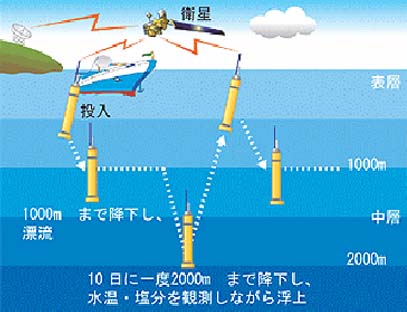
図14.4 アルゴ計画と中層フロート(気象庁)
図14.5 中層フロートの運用状況 (気象庁)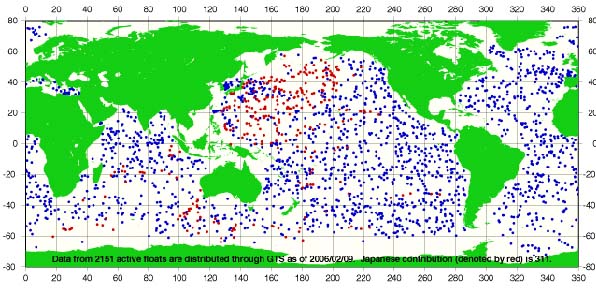
つぎは、TAO/TRITON海洋観測網(図14.6)である。これは係留ブイを熱帯域に展開し、エル・ニーニョ現象解明のため広域の気象・海象を計測するものである。わが国は西部海域に20基のトライトン・ブイ(Triton buoys)(図14.7)を設置して、風、気温、湿度、降水量、日射量、および水温、塩分、流速を観測している。
図14.6 TAO/TRITONブイ観測網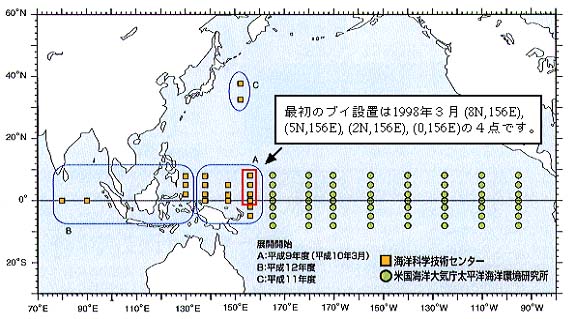
図14.7 トライトン・ブイ (JAMSTEC)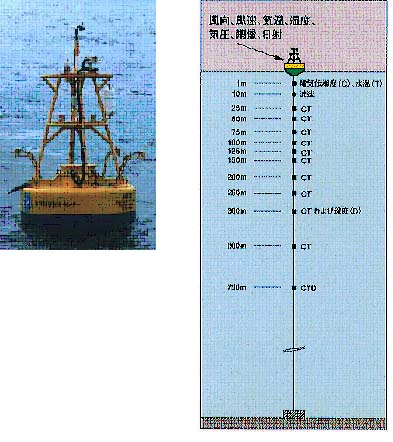
14.2 リモートセンシングによる海洋観測
気象の分野では観測衛星が大活躍している。最初の人工衛星スプートニクの打ち上げ(1957)から3年後にはタイロスが地球の雲の映像を送ってきた。いまから見るとお粗末なテレビ画像であるが、大気・海洋・大陸を総観する新たな視点を与えた意義は大きかった。その後も矢継ぎ早に各種の衛星が打ち上げられ、わが国では1977年に静止気象衛星「ひまわり」が赤道上空からの観測を始めた。海洋に関しては気象衛星に10年遅れ海洋観測衛星「もも」の検証実験が開始された(1987)。「もも」には可視・近赤外センサー(MESSR)、熱赤外センサー(VTIR)、マイクロ波センサー(MSR)が搭載され、富山湾においても水温や透明度などについて衛星観測の有効性を検証する実験(5)が行われた。海洋科学に衛星観測の展望を開いたシーサット(1978)は合成開口レーダ、散乱計、高度計、放射計など各種センサーを搭載しマイクロ波による海洋観測を実施した。この衛星はわずか3ヶ月の寿命で終わったが海上風、波高、波スペクトル、海面トポグラフィーについて有用な結果をもたらした。こうして雲のあるなしにかかわらず観測できるマイクロ波センサーは海洋衛星観測の主役として以後の観測衛星に継続的に搭載されることになった。例えば高分解能映像レーダである合成開口レーダはEERS、JERS、RADARSAT、ALOS(だいち)などの衛星に搭載され全世界の陸面・海面の画像を取得している。筆者らは富山湾の波浪観測に合成開口レーダ・データを適用してその有効性を検証する実験(6)を行った。その結果、「寄り回り波」のようなうねり性の波について広域の波向、波長など有用な情報が得られることを確認した。波浪については現在気象庁が数値モデルによる沿岸波浪予報を実施しているが、上記の衛星画像はこの沿岸波浪図と比較してはるかに詳細な情報を含んでいる。衛星観測には広域の観測がほぼ同時に行えること、陸から遠く離れたどんな海域でも観測できること、同一地域を繰り返し観測できることなどの利点がある。ただし、可視・近赤外センサーはマイクロ波とは異なり雲があれば海面観測は不可能である。
観測データから実海域の物理量たとえば水温を推定するには船を動員して現場で実測した表皮水温との照合が必要となる。わが国が打ち上げたADEOSⅡにはクロロフイル計測センサーが搭載されたが、クロロフイル量の推定にも同様の手続きが必要である。このように海洋リモートセンシング技術の向上には衛星観測に同期して現場観測を行い(sea truth)衛星データを海上データに回帰的に適合させる照合検証を重ねることが不可欠である。検証実験により物理量推定についての確実な知見が得られたときはじめて、衛星海洋観測は実用の段階を迎えることになる。よく指摘されるように海洋は未知な点が多い。その最大の原因は海が近づきがたく、海上観測が容易でないことである。気象学の分野で人工衛星データが導入されて天気予報の精度が格段に進歩したように、海洋学の発展のためにもリモートセンシング技術の利用を促進することが肝要であろう。そのためには衛星観測に同期して現場海域における基礎データを多数収集することが必要である。一般的に現場観測は船を使用して実施されるが衛星の観測に合わせて船を運航することは容易でないし、近づきうる海域にも限界がある。そこで期待されるのが高い機動性と計測能力を備えた観測ロボット船の開発である。
14.3 レーダ(SAR)を用いた海洋波の観測
レーダは電波(マイクロ波)を発射して目標から帰る電波を受信するものであるが、受信波の中の信号の大きさは目標の物体表面が電磁波を散乱する能力に比例する。この能力は目標物体の後方散乱係数といい、慣習によってσで表す。σは表面の電気的な性質と形状、とくに表面の粗さで決まる。人工衛星に搭載されるレーダに合成開口レーダ(SAR、Synthetic Aperture Radar)がある。レーダはアンテナの大きさで分解能が決まるのであるが、衛星には大きなアンテナは積めないから高速飛行を利用して、あたかも長大なアンテナを搭載しているかのように工夫されたのがSARである。
SARで波浪が観測される理由は次のとおりである。マイクロ波は海面に当たると水中に入りこめず表面で散乱する。この海面散乱の立役者は「さざなみ」であるというのが現在の電波海洋学の基本になっている。海面にさざなみがあればマイクロ波の波長に共鳴する波がどこかにあるはずで、そこでは干渉がおこって強く散乱する。このような散乱は海面を回折格子とみなすのでブラッグ散乱といえる。風が吹けばさざなみが立つ。さざなみが立てば散乱が強まりσが大きくなってSAR画像の輝度が増す。
次は波浪とさざなみの関係である。海面にうねりがあるとする。うねりの山と谷にある水粒子は楕円運動をするが山と谷では回転の方向が反対である。そのために、谷から山への部分と山から谷への部分には表面で水粒子が発散するところと収束するところができる。発散するところにあるさざなみは小さくなり、収束するところのさざなみは大きくなる。さざなみの振幅の増減はσにはねかえる。いってみれば、さざなみがうねりの波面あるいは位相に印をつけ、SAR画像に波が映るというわけである。この他にも、波浪による水面傾斜とレーダ波の入射角が異なるためσに違いが生じたり、水粒子運動が山と谷で違うことがドップラー効果を生みσの変調をきたす。また、うねりの進行方向と風向あるいは衛星の飛行方向の関係もレーダ映像に影響を与える。
(1) 寄り回り波の観測
富山湾沿岸で古くから知られた「寄り回り波」は低気圧の通過後2、3日経過して天気が回復したころに現れる高波で、湾内の特定箇所で波高が一段と高くなるといわれる。図14.8は1993年3月17日から18日にかけて発生した寄り回り波を映した、ヨーロッパ宇宙連合が打ち上げた人工衛星ERS-1 の合成開口レーダSAR画像(6)である。ERS-1 SARは周波数5.3 GHz(Cバンド,波長5.66cm)の電波(VV偏波)を入射角23°で海面にあて、さざなみで散乱された電波から地上走査幅100km、分解能15m の高解像映像を取得するものである。ちなみに衛星ERSの高度は785kmである。衛星の観測に同期して実海面データを収集した。富山商船高等専門学校練習船<若潮丸>および

図14.8 ERS-1 SAR画像 富山湾(1993.3.18)

図14.9 ERS-1 SAR画像(海老江)
(2) SAR画像上の「寄り回り波」の特徴
「寄り回り波」を富山湾全体の現象と考えれば、富山湾のスケールで観測しないとその特徴は把握できない。富山湾全体を映した図14.8と湾奥部を拡大した図14.9により「寄り回り波」の特徴抽出を試みた。映像上の各種パターンを判読し特徴をまとめると、
(イ)二方向からの波が湾中央部で交差している様子がみられるが、その交角は
小さい。外から伝播してくる波浪の角分散や波源の移動などを考慮すると卓越波の波向はきわめて揃っている。
(ロ)北からくるうねり性の波は黒部川河口から東部沿岸に沿いまっすぐ南下
し、波峰線は海岸線にほぼ直交する。黒部川河口付近で水深が急降下するため波浪に対して海底の影響が働かないためと考えられる。
(ハ)北から進入するうねりの場合,大きな波群は先に滑川方面に到達し、その後
西に回りこむように伝播する。
(ニ)波が高くなる射水市海老江沖で波が屈折するのが認められる。富山湾奥は
弓なりの単調な海岸線が続くが、海底では岬(海脚)あり、入り江(海谷)ありのたいへん複雑な地形である。ふつう海岸は岬-入り江-岬-とつづき、岬では波が高く、入り江は波の静かな浜の所が多い。海老江の沖はちょうど海中の岬の部分にあたり、波が屈折してエネルギーが集中するため、波が高くなると考えられる。ほかにも複雑な海底地形を反映した波の変形模様がみられる。
(ホ)大陸棚がやや発達した湾西部において波峰線が海岸線と平行に変化する。
上記のように「寄り回り波」には災害をひきおこす厄介な面があるが、波と波に伴う流れは、沿岸水を撹拌し海藻はじめ海中生物に対して酸素や栄養塩類の供給を促進するとともに、浮泥を除去し海藻の掃除をするなど、沿岸の水中環境をリフレッシュする大切な働きのあることも認識する必要がある。
14.4 光学センサーによる水温の観測
海面水温は大気・海洋相互作用を示す指標として重要であるので、人工衛星による観測研究がNOAAに搭載された熱赤外放射計を使用して精力的に進められてきた。ここではMOS-1の可視・熱赤外放射計VTIRによる水温推定(5)について述べる。VTIRは大気の窓領域に11μm帯と12μm帯の2つのバンドをもつセンサーである。大気がこれらの放射にたいして完全に透明であれば衛星が観測する放射強度を輝度温度に換算するだけで海面温度が求められるが、水蒸気による吸収やエアロゾルによる散乱を受けるため補正が必要である。気象衛星で大気の鉛直温度構造を推定するときは海面温度がノイズになるが、海洋衛星で海面温度を推定するときは大気が邪魔になる。大気補正法としては赤外域の2バンドを利用するスプリット・ウィンド法が一般的である。次式は筆者らが求めた海面水温推定アルゴリズムである。
TS =T3+0.62(T3-T4)+(T3-T4+0.4)sec(SZA)
ここでTSは海面水温、T3、T4 はバンド3、バンド4で得られた輝度温度、SZAは人工衛星の天頂距離である。この式の第2項目は大気中の水蒸気の効果を補正するもので、第3項目は大気の光路長(衛星と海面間に介在する大気の質量)に起因する誤差を補正するものである。式の導出は、2つの波長帯の吸収が水蒸気によることから放射伝達の方程式を TS-T3=a(T3-T4)+b と簡単化し、大気の透過率と分光放射輝度を算出するコンピュータ・プログラムLOWTRAN6によるシミュレーションをおこない最小自乗法で係数を決定して求めた。図14.10に本実験の推定値と実測値の比較を示す。推定式のバイアス誤差は0.32 Cで海面水温をやや低めに推定し、RMS誤差は僅かに劣化し1.01 Cであった。推定精度としてはVTIRの温度分解能が0.5 Kであることから海面水温の推定に十分適用できる結果と考えられる。
図14.10 海面水温推定アルゴリズムの精度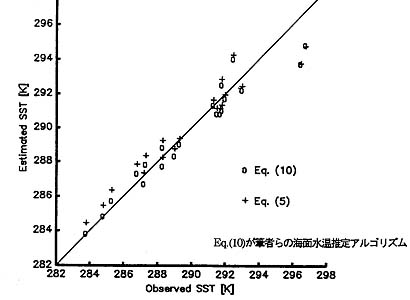
14.5 海洋リモートセンシングと現場観測
海洋リモートセンシングの最大の利点は広範囲の海を瞬時に観測できることである。100km四方の富山湾規模の波浪や海面水温の観測を数秒で行えることはまさに驚異的である。しかしこの方法は電磁波を利用して遥か上空から厚い大気の層を通して海洋を<はかる>技術であるために難しい問題も多くかかえている。たとえばレーダ波と海洋波浪との相互作用といった基礎的な物理過程の解明や可視・赤外線の大気補正の問題などである。このような問題を解決するためには現場の海上で観測を行うことが必要である。衛星から海の波をはかるときには波高、周期、波向などの海象要素(これをパラメータといおう)の他にさざなみの状況や海上風、海面水温を記録しておくと「衛星観測が何をはかっているか」を推定するとき役立つ。ところで衛星観測と海上観測の性格の違いを明確にしておきたい。ひとつの違いは伝統的な海上観測がピン・ポイントにおける観測を原則とするのに対して、衛星観測はセンサーの瞬時視野角内の積分値を観測する。したがって、海上観測はパラメータの局所的な精細観測に向いているが、パラメータの勾配を検出することは不得手である。これに対して衛星観測は点情報を平均し面情報として海をはかるので海面水温の絶対値測定は苦手であるが、規模の大きな現象の把握に向いている。海洋パラメータの空間変動についてさらに理解が進めば「海が渦で満ちている」ことを示す海の天気図が現われるであろう。波浪のSAR映像は広がりのある空間に存在した波浪パラメータの統計値が可視化されたものであるが、今後は内部波などこれまで見えにくかった現象がパターンとして可視化されることも多くなるだろう。両観測のもうひとつの違いは、海上観測が直接的で衛星観測が間接的であることである。大気補正における現場観測の重要性については前述したが、海面観測データは大気補正モデルを使った計算結果の検証に不可欠であるし、衛星データとの間に回帰的なあてはめをおこなえば簡易な大気補正手法となる。
衛星観測に同期した現場観測を実施する場合は目的を明確にして綿密な計画を立てる必要がある。海洋の現象は陸の事象と異なり時間的に変動するので決められた一定時間にシートルースを実施しなければならない。衛星運航センターに観測リクエストを出したら簡単に予定変更できないことを念頭において、とくに船の運航をともなう海上観測は人員の配備、観測機器の整備、予備試験、作業手順など十分に打ち合わせて準備をしなければならない。
現場観測の実効性を向上させるためには、現場における観測機器を衛星観測に対応させ放射観測を取り入れていく必要がある。たとえば衛星はまさに海面水温を観測しているが、現場ではいわゆるバルク水温を観測することが多い。やはり放射温度計で表皮水温を計測したいものである。クロロフイル観測についても海面での放射計による色測定がほしい。現場において手軽に使える放射計や輝度計の開発が待たれる。
前項において衛星観測データと現場観測データとの間にはもともとサンプリング時点からミスマッチがあると述べたが、さらに両データを比較するときに空間サンプリングの間隔が問題になる。できるだけ広域のデータ・ベースを得るには広域のトルース・データをとる必要がある。海洋リモートセンシングにおける現場観測の課題のひとつである。
リモートセンシング技術を海洋に適用するにはまだ時間が要るようであるが、その将来性は衆人が期待するところである。衛星から海を測るのに海での観測が必要であるというのもおかしな話であるが、いましばらくは当技術の発展のために現場海域におけるシートルース・データが必要とされるだろう。これも地球観測を大きく飛躍させる産みの苦しみと捉えたい。
まとめ
1 海の観測は海を知る最良の方法である。
2 海の流れを観測するにも種々の方法がある。
3 海洋と気候の関係を知るために地球規模のアルゴ計画やTAO/TRITON
観測網がある。
4 海洋観測手法の一つにリモートセンシングがある。
5 人工衛星搭載の合成開口レーダを用い富山湾全域のおける寄り回り
波の観測が行われ、SAR画像上の特徴が抽出された。
6 光学センサーVTIRの検証実験により海面水温の推定に十分な結果が
得られた。
7 海洋リモートセンシングの現状では現場観測(sea truth)が欠か
せない。
よくある質問
1 航海ではどのようなレーダを使用しているか
(答)レーダは闇の中でも霧の中でも物を見ることができる。他船や
陸岸などの距離と方向を知る舶用レーダにはXバンド(10GHz、3cm)やSバンド(3GHz、10cm)のマイクロ波が多く使われる。
2 海で漂流したらどうすればよいか
(答)必ず助かるという強い精神力をもつこと。沈没を避ける工夫をす
る、自分の位置を考え、岸に近づく努力をする、体温の低下を防ぎ、力の消耗を避ける、食料と水(海水1に真水2の水割りまで大丈夫)の使い方を考える、釣りや雨水を溜めて食料や飲料水の確保に努める、旗、音、煙などSOSの信号を発する等など、その場の状況を適切に判断して行動する。生物学的に強い人間力を信じ最後の1秒まで生きること。
3 ジャイロコンパスはなぜ北を指すのか
(答)ジャイロコンパスはひとつの軸の周りに高速で回転するコマを
第2および第3軸のまわりに自由に旋回できるように、枠を用いてコマを重心で支えた装置で、コマの軸を直接支える枠には錘を吊るしてある。コマの軸が南北方向からそれると地球自転のため軸に偶力が働き常に南北を指すようになる。
ジャイロコンパスの指北原理については、山内恭彦「大学演習 力学」、裳華房、p.261 などを参照されたい。
参考文献
(1)気象庁編「海洋観測指針」日本気象協会、1988
(2)松平一昭、斉藤郁博、佐藤寛之、楠元達也著「富山湾の海流と
水温」富山商船高等専門学校卒業研究報告、1974
(3)石森繁樹著「油の漂流予測」富山商船高等専門学校公開シンポジ
ウム『ナホトカ号油流出事故に関連して』講演集、1997
(4)石森繁樹著「新若潮丸のADCPシステムについて」富山商船高等
専門学校研究集録第9号、1996
(5)Ishimori,S.,et al. Case Study of Earth Observation Using
MOS-1: (1)Color of Sea and Transparency,(2)SST,(3)Actual Vegetation, The Third Symposium on MOS-1 Verification Program, EOC/NASDA, 1989
(6)Ishimori,S.,et al. On the Image of the "Yorimawari-nami"
by Synthetic Aperture Radar, Final Report of JERS-1/ERS-1 System Verification Program, MITI/NASDA, 1995